Issues with SLAM metrics
Mateo de Mayo
20 April 2022
Summary
"When a measure becomes a target, it ceases to be a good measure"— Does SLAM research suffer from Goodhart's law?
Remarks about standard tracking metrics and their issues
ORB-SLAM3 ATE/RTE scores shown in the previous blogpost are awful compared to the ones reported in their paper1. That’s because they report the error once the entire dataset has been run, which retroactively modifies the trajectory as new loop closures get detected. We can improve the errors in realtime for Monado significantly by first building the map and then loading it, but as of now, that feature is very unstable in ORB-SLAM3 (i.e., crashes a lot). There is a good writeup about causal vs non causal metrics usage in the preprint from OKVIS22 in section VII.
However, there was another issue hiding in plain sight that the measurement tools (also presented in the previous blogpost) made obvious, even when considering the post processed metrics of ORB-SLAM3.
Take for example this section from the EuRoC MH01 dataset which shows Basalt trajectory against ground truth to the left and ORB-SLAM3 post processed trajectory to the right. You will need to zoom in the image.
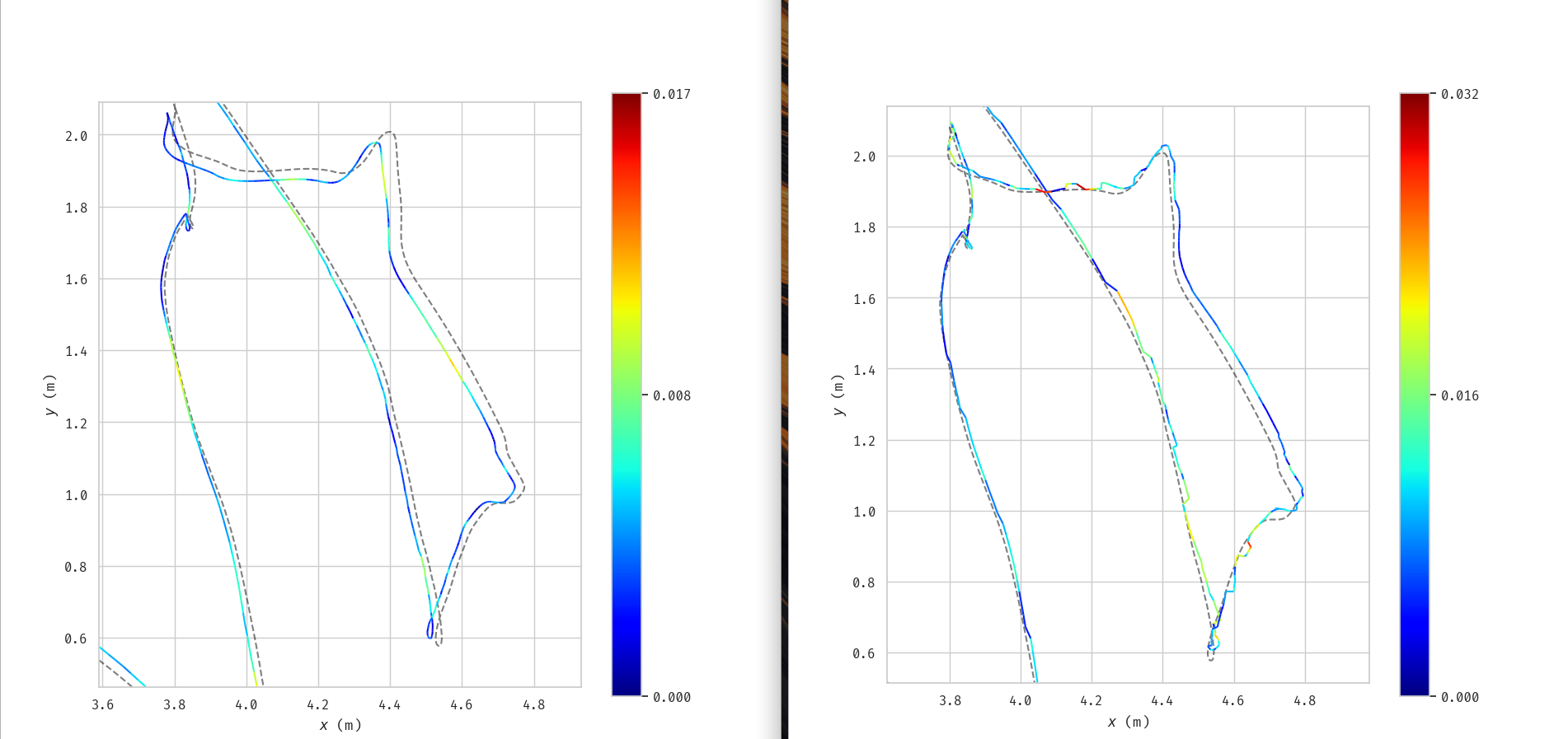
In this dataset, Basalt scores an absolute error (ATE) of 0.066m while ORB-SLAM3 scores better at 0.043m. And when you see the images you can see that indeed, ORB-SLAM3 path is closer to the ground truth (the dotted line), but the amount of jitter it has compared against Basalt is unreasonable for VR. And remember that this is a postprocessed trajectory, things are worse when you run ORB-SLAM3 without mapping your room first.
Then you could say, “well, surely relative metrics like RTE must show that Basalt has a smoother trajectory”. But that’s not as straightforward an answer neither. For the image above the RTE of Basalt is 0.005219m and for ORB-SLAM3 it is 0.0077m. Sure Basalt scores better, but does that number tell you how much better it is? See this other similar image below from the EuRoC V101 dataset:
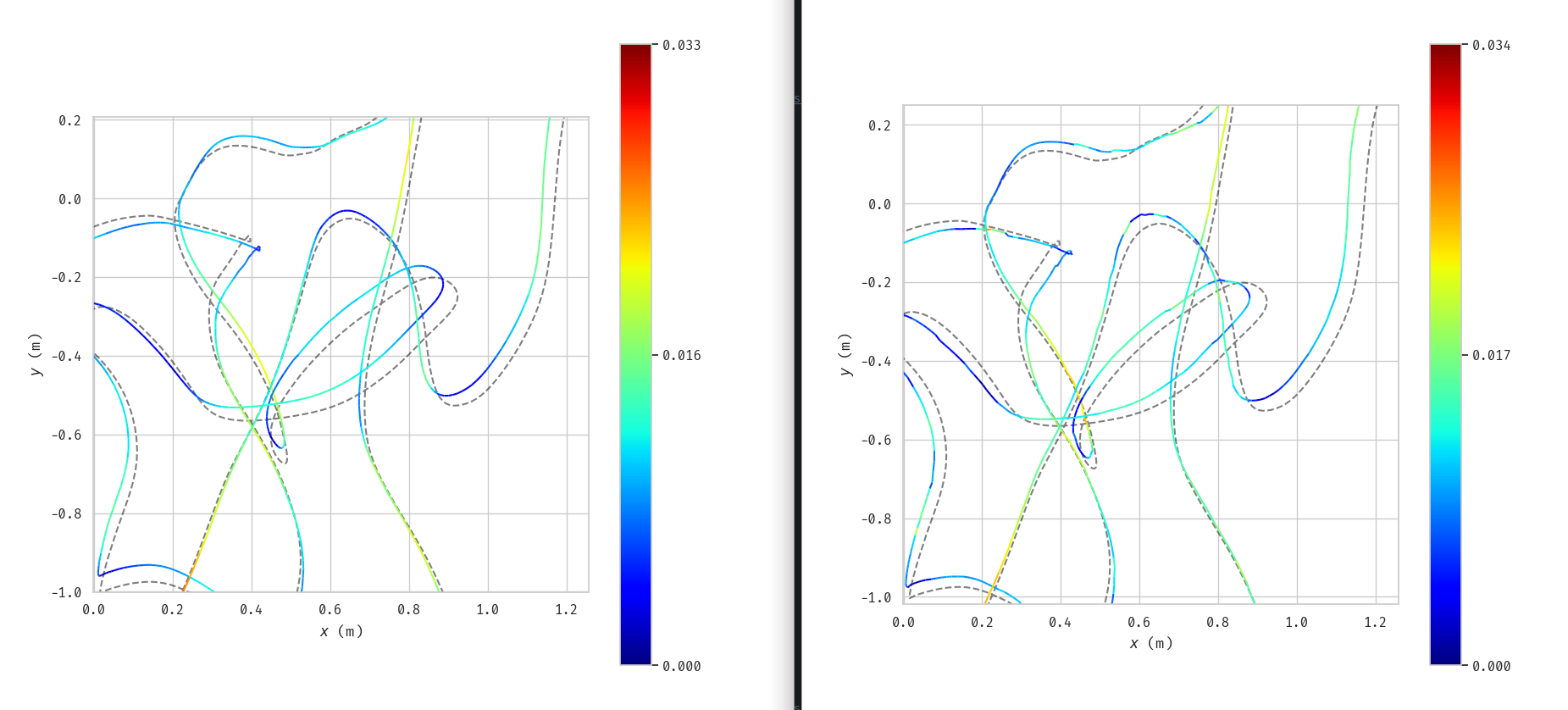
In this example Basalt scores in RTE 0.0130m while ORB-SLAM3 scores 0.0139m. Sure it’s worse, but again those numbers don’t seem to be good at really telling by how much ORB-SLAM3 is worse.
In any case, this was a bit of a ramble and yes, I’m only showing two sections of isolated trajectories, so take what I’m saying with a pinch of salt. But even then, I think it was worth mentioning these issues and how the usual ATE/RTE metrics used for VIO/SLAM research might not be very well suited for XR. They are a good starting point for sure, but I think there is value exploring new metrics that better represent the problems XR is faced with.
References
-
ORB-SLAM3: https://arxiv.org/abs/2007.11898 ↩
-
OKVIS2: https://arxiv.org/abs/2202.09199 ↩